|
3月23日上午,上海市科学技术奖励大会在友谊会堂举行。上海市市委书记、市长及相关领导出席大会并为获奖代表颁奖。上海市文物保护研究中心、宁波市文物考古研究所与上海大学合作完成的“机器人水下考古装备关键技术及应用”,荣获上海市技术发明二等奖。这是全国水下考古技术领域首次获得省部级科技发明奖, 标志着智能化水下考古自主创新取得新进展。 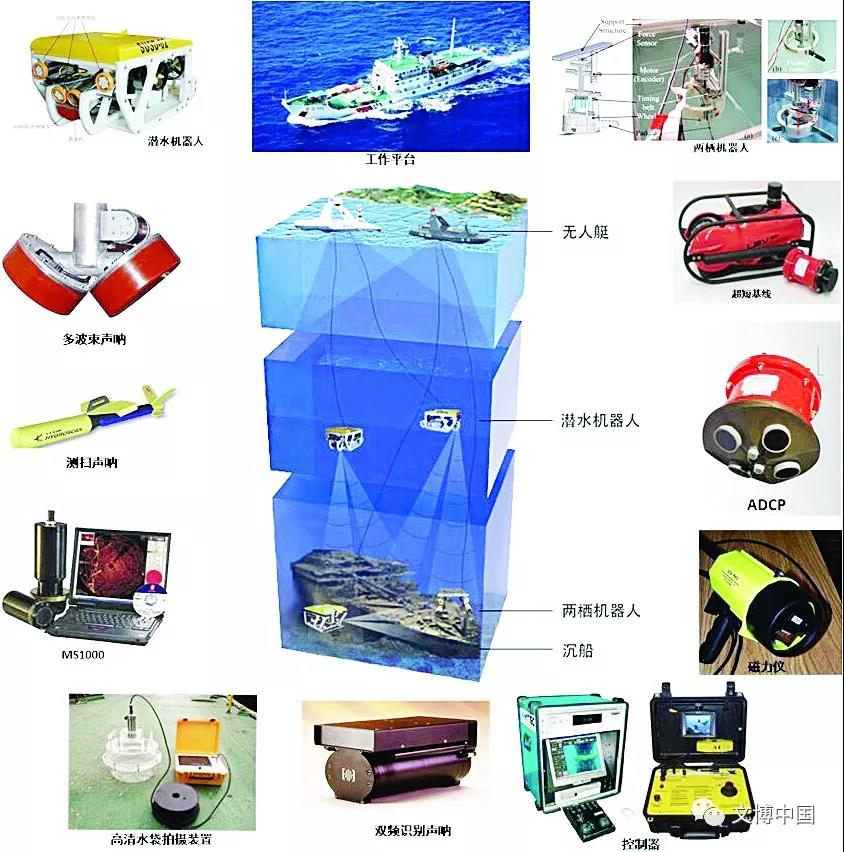 “机器人水下考古装备关键技术与应用”旨在破解传统水下考古技术设备的局限与瓶颈,显著提高在浅滩、暗礁、浑水、急流等复杂水域环境中的水下考古作业能力。在项目酝酿、策划、研发、测试、应用等全过程中,上海文物保护研究中心和宁波市文物考古研究所(国家水下文化遗产保护宁波基地)充分发挥在水下考古方面的专业优势、技术特长与实践经验,同时紧密依托上海大学机电工程与自动化学院,整合了水下机器人系统、海洋智能无人系统、机械、自动化、电子工程等多支技术团队,协同创新、攻关克难,率先在以下关键技术取得了突破: 水面/水底淤泥面两栖作业考古机器人及多模态运动控制生成技术。多构型多模态两栖机器人的6种运动步态,提出了基于振荡器相位调整的步态间平滑转换方法,实现了两栖机器人在多介质环境下的多运动步态统一生成控制,有效解决了水下考古扫测避障的问题。 面向水下考古的机器人协同控制和探测技术。发明EDA控制方法,综合考虑主动方向的轨迹规划方法,实现了多种机器人的稳定协同运动;采用基于图优化的高精度同步定位与地图构建技术,进行实物重建,构建精度提高大于3倍,在一定程度上提高了水下文物成像准确度和清晰度。 主动轮廓和粒子滤波的复杂水域水下文物目标跟踪探测技术。发明了基于轮廓的目标跟踪算法,提高轮廓跟踪的效率;通过粒子滤波对目标位置和大小进行跟踪,解决跟踪过程中的非线性、非高斯问题,有效改善了复杂水域水下文物识别困难的困境。 “机器人水下考古装备关键技术与应用”在测试应用阶段,就极大助力了上海“长江口I号”“长江口II号”沉船的调查发现,还为宁波“小白礁Ⅰ号”沉船发掘项目荣获全国“田野考古奖”、上林湖后司岙唐五代秘色瓷窑址考古荣获“全国十大考古新发现”提供了有力的技术支持。目前,项目组已获授权发明专利10项、公开和实审发明专利25项,在国内率先构建了专门针对复杂水域、面向水下考古的两栖机器人协同控制系统和水下文物探测、跟踪技术体系,初步破解传统水下考古技术设备的局限与瓶颈,为我国在浅滩、暗礁、浑水、急流等复杂水域开展水下考古调查、探测、发掘提供了的高新技术支撑,开创了智能化水下考古新篇章,被上海科技情报研究所认定为国内首创、国际先进的水下考古技术发明。(上海市文物保护研究中心 宁波市文物考古研究所 上海大学) (原文刊于:《中国文物报》2018年3月30日第3版) (责任编辑:admin) |